Singular Value Decomposition (SVD) av en matris är en faktorisering av den matrisen i tre matriser. Den har några intressanta algebraiska egenskaper och förmedlar viktiga geometriska och teoretiska insikter om linjära transformationer. Den har också några viktiga tillämpningar inom datavetenskap. I den här artikeln ska jag försöka förklara den matematiska intuitionen bakom SVD och dess geometriska betydelse.
Matematik bakom SVD:
java samlingar
SVD för mxn matris A ges av formeln 
var:
- I: mxm matris för de ortonormala egenvektorerna för
 .
. - IT: överföra en nxn matris som innehåller de ortonormala egenvektorerna för
 .
. -
 : diagonal matris med r element lika med roten av de positiva egenvärdena för AAᵀ eller Aᵀ A (båda matrikerna har i alla fall samma positiva egenvärden).
: diagonal matris med r element lika med roten av de positiva egenvärdena för AAᵀ eller Aᵀ A (båda matrikerna har i alla fall samma positiva egenvärden).



Exempel
- Hitta SVD för matrisen A =

- För att beräkna SVD måste vi först beräkna singularvärdena genom att hitta egenvärden för AA^{T}.


- Den karakteristiska ekvationen för ovanstående matris är:



så våra unika värden är: 
- Nu hittar vi de rätta singularvektorerna, dvs ortonormal uppsättning egenvektorer för ATA. Egenvärdena för ATA är 25, 9 och 0, och eftersom ATA är symmetrisk vi vet att egenvektorerna kommer att vara ortogonala.
För 

som kan radreduceras till:

En enhetsvektor i dens riktning är:

På liknande sätt, för lambda = 9, är egenvektorn:

För den 3:e egenvektorn skulle vi kunna använda egenskapen att den är vinkelrät mot v1 och v2 så att:

Löser ovanstående ekvation för att generera den tredje egenvektorn

Nu beräknar vi U med formeln u_i = frac{1}{sigma} A v_i och detta ger U =  . Därför blir vår slutliga SVD-ekvation:
. Därför blir vår slutliga SVD-ekvation:

Ansökningar
- Beräkning av Pseudo-invers: Pseudo-invers eller Moore-Penrose-invers är generaliseringen av matrisinversen som kanske inte är inverterbar (som lågrankade matriser). Om matrisen är inverterbar kommer dess invers att vara lika med Pseudo-invers men pseudo-invers finns för matrisen som inte är inverterbar. Det betecknas med A+.
Suppose, we need to calculate the pseudo-inverse of a matrix M: Then, the SVD of M can be given as: Multiply both sides by M^{-1}.Multiply both side by V:Multiply by W^{-1}Since the W is the singular matrix, the inverse of W is Multiply by>Ovanstående ekvation ger pseudo-inversen.
Lösa en uppsättning av homogen linjär ekvation (Mx =b): om b=0, beräkna SVD och ta valfri kolumn av VTassocierad med ett singulär värde (i I ) lika med 0.
If , Multiply by>
Från Pseudo-inversen vet vi det 
Därav,
krom adressfält

- Rang, Range och Null space:
- Rangen för matrisen M kan beräknas från SVD genom antalet singularvärden som inte är noll.
- Området för matrisen M är de vänstra singularvektorerna för U som motsvarar singularvärdena som inte är noll.
- Nollrummet för matrisen M är den högra singularvektorn för V som motsvarar de nollställda singularvärdena.

- Problem med kurvanpassning: Singularvärdesuppdelning kan användas för att minimera minsta kvadratfel. Den använder pseudo-inversen för att approximera den.
- Förutom ovanstående applikation kan singularvärdesuppdelning och pseudo-invers också användas i digital signalbehandling och bildbehandling
Genomförande:
I den här koden kommer vi att försöka beräkna singularvärdesuppdelningen med hjälp av Numpy och Scipy. Vi kommer att beräkna SVD och även utföra pseudo-invers. I slutändan kan vi använda SVD för att komprimera bilden
Python3
# Imports> from> skimage.color>import> rgb2gray> from> skimage>import> data> import> matplotlib.pyplot as plt> import> numpy as np> from> scipy.linalg>import> svd> '''> Singular Value Decomposition> '''> # define a matrix> X>=> np.array([[>3>,>3>,>2>], [>2>,>3>,>->2>]])> print>(X)> # perform SVD> U, singular, V_transpose>=> svd(X)> # print different components> print>(>'U: '>, U)> print>(>'Singular array'>, singular)> print>(>'V^{T}'>, V_transpose)> '''> Calculate Pseudo inverse> '''> # inverse of singular matrix is just the reciprocal of each element> singular_inv>=> 1.0> /> singular> # create m x n matrix of zeroes and put singular values in it> s_inv>=> np.zeros(X.shape)> s_inv[>0>][>0>]>=> singular_inv[>0>]> s_inv[>1>][>1>]>=> singular_inv[>1>]> # calculate pseudoinverse> M>=> np.dot(np.dot(V_transpose.T, s_inv.T), U.T)> print>(M)> '''> SVD on image compression> '''> cat>=> data.chelsea()> plt.imshow(cat)> # convert to grayscale> gray_cat>=> rgb2gray(cat)> # calculate the SVD and plot the image> U, S, V_T>=> svd(gray_cat, full_matrices>=>False>)> S>=> np.diag(S)> fig, ax>=> plt.subplots(>5>,>2>, figsize>=>(>8>,>20>))> curr_fig>=> 0> for> r>in> [>5>,>10>,>70>,>100>,>200>]:> >cat_approx>=> U[:, :r] @ S[>0>:r, :r] @ V_T[:r, :]> >ax[curr_fig][>0>].imshow(cat_approx, cmap>=>'gray'>)> >ax[curr_fig][>0>].set_title(>'k = '>+>str>(r))> >ax[curr_fig,>0>].axis(>'off'>)> >ax[curr_fig][>1>].set_title(>'Original Image'>)> >ax[curr_fig][>1>].imshow(gray_cat, cmap>=>'gray'>)> >ax[curr_fig,>1>].axis(>'off'>)> >curr_fig>+>=> 1> plt.show()> |
>
>
Produktion:
[[ 3 3 2] [ 2 3 -2]] --------------------------- U: [[-0.7815437 -0.6238505] [-0.6238505 0.7815437]] --------------------------- Singular array [5.54801894 2.86696457] --------------------------- V^{T} [[-0.64749817 -0.7599438 -0.05684667] [-0.10759258 0.16501062 -0.9804057 ] [-0.75443354 0.62869461 0.18860838]] -------------------------- # Inverse array([[ 0.11462451, 0.04347826], [ 0.07114625, 0.13043478], [ 0.22134387, -0.26086957]]) ---------------------------> 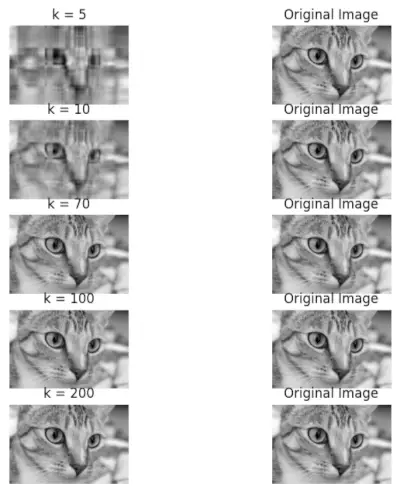
Original vs SVD k-bild